Carte de contrôle T’REX
Le contrôleur T’REX de Dagu est un double pont en H qui va permettre de contrôler la vitesse et le sens des moteurs. Il dispose d’un microcontrôleur ATMEGA328 avec un bootloader Arduino ce qui permet d’y mettre son propre code. Il vient avec un code d’exemple qui permet de contrôler les moteurs par un transmetteur RC, par un contrôleur externe via I²C, ou par Bluetooth. Il supporte une tension de 6V à 30V et peut fournir 9A en continue par moteur (avec le châssis Wild Thumper, pour 3 moteurs) et jusqu’à 40A en pic. Il dispose de fusibles réarmables PTC qui protègent les moteurs si le courant dépasse 40A.
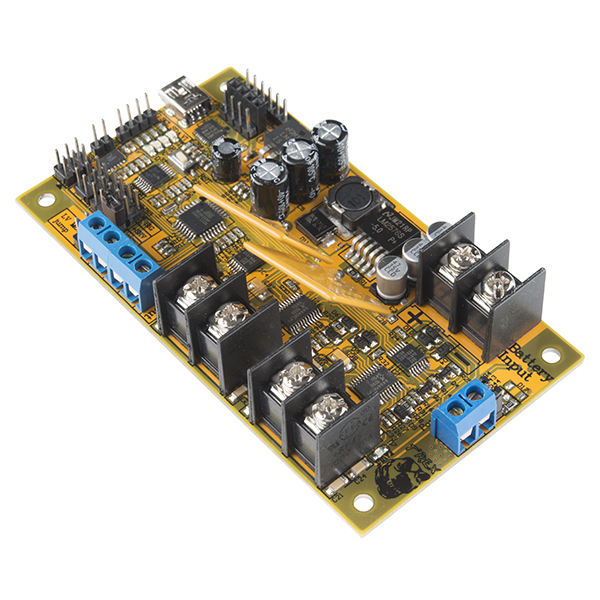



Source images : https://www.sparkfun.com/products/retired/12075
Montage et câblage
La carte T’REX est fournie avec 8 entretoises : 4 de 6mm et 4 de 30 mm de longueur. Les espacements entre les trous de la carte sont les même que la grille du Wild Thumper. De plus, elle rentre parfaitement dans un compartiment à batterie du Wild Thumper, donc il est tentant de l’installer ici avec les entretoises 30mm. Mais en faisant ça, la carte touche 2 vis du châssis et court-circuite la carte ce qui la détruit immédiatement. Il est préférable d’utiliser des entretoises plus longues, ou de la monter au dessus du châssis avec les entretoises plus courtes.
Il faut maintenant relier la carte entre la batterie et les moteurs. Les batteries sont généralement équipées de connecteur Tamiya femelle, il faut trouver un connecteur mâle avec une assez grosse section de câble vu le courant à supporter. Attention, il ne faut pas confondre avec les connecteurs mini Tamiya qui équipent la plupart des petites voitures radiocommandées. Pour faire la liaison avec la carte T’REX, il faut un câble qui soit suffisamment large pour encaisser une grosse charge de courant sans chauffer. J’ai choisis un câble de diamètre 14awg qui est peut être surdimensionné, mais il vaut mieux trop que pas assez. Pour qu’ils puissent être connectés sur la carte, il faut sertir des cosses électriques sur les câbles. Pour résumer le câblage de la batterie :
Batterie ---- Connecteur Tamiya Mâle ---- Domino ---- Câble 14AWG ---- T'REX
Le câblage des moteurs est plus simple : pour chaque ligne de moteur il faut installer un câble entre la carte et le domino. Les borniers correspondants sont indiqués dans la documentation ci dessous.
Source :
https://www.robotshop.com/forum/chassis-screws-t-rex-motor-controller-with-wild-thumper-6wd-t11376
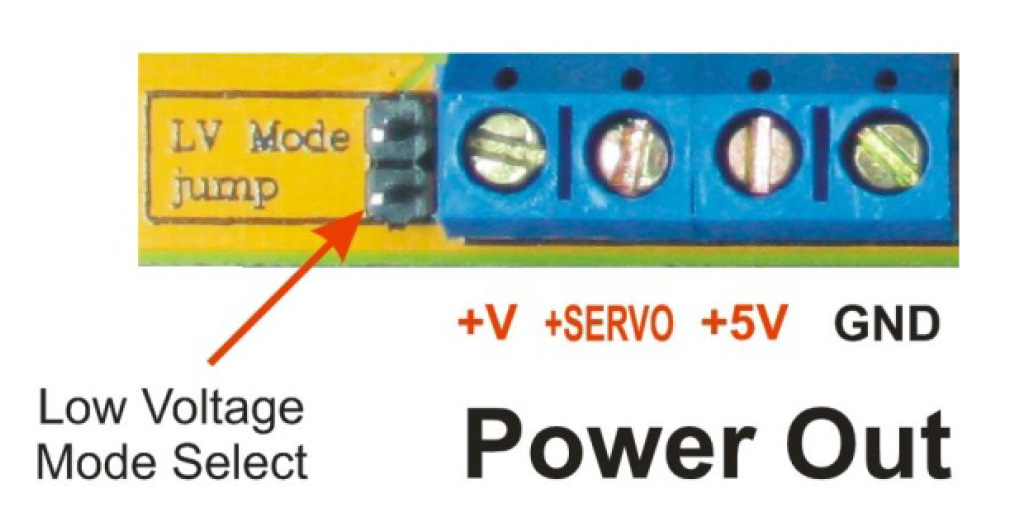
Mode basse tension
Dans le cas d’utilisation de batterie de tension inférieure à 8V, comme les 6V SLA, 7.2 NiMh ou 7.4V LiPo, il est nécessaire d’activer le mode basse tension. Pour cela, il faut ajouter un cavalier (fourni) sur les pins d’activation, ce qui va entre autres alimenter les servomoteurs directement sur la batterie. Dans ce mode, le régulateur 5V peut devenir très chaud, il ne faut pas dépasser une intensité de 800mA sans ajouter un radiateur et ventilateur sur le régulateur LM1084. Par peur d’endommager la carte, je préfère choisir une autre source pour alimenter le Raspberry Pi.
Documentation
Spécifications
Processor
| MCU: | ATmega328P |
| Clock speed: | 16MHz |
| Logic voltage: | 5V |
| FLASH: | 32K |
| SRAM: | 2K |
| EEPROM: | 1K |
| Bootloader: | Arduino Nano w/ ATmega 328 |
Power supply
| Supply voltage: | 6V – 30V |
| Power switching FET maximum current: | 20A continuous – 110A peak |
| Switch mode regulator: | 6V, 3A maximum, 52kHz |
| +5V output current: | 2A continuous – 3A peak |
Dual H Bridge
| Voltage: | Motors powered directly from battery |
| Current per motor: | 9A continuous – 40A peak |
| Current sensor: | Sensitivity 100mV / Amp |
| Fuse type: | 30V / 9A self-resetting PTC |
| Fuse resistance: | 0.005Ω – 0.020Ω |
| Fuse hold current (23°C): | 9A continuous |
| Fuse trip current (23°C): | 18A minimum |
| Fuse maximum current (23°C): | 40A maximum |
| Electronic braking current: | 85A maximum |
Accelerometer
| Type: | MMA7361L – Freescale Semiconductor |
| Voltage: | 3.3V |
| Number of axes: | 3 |
| Sensitivity: | 1.5g or ±6g |
| Output: | Analog (amplified from 3.3V to 5V scale) |
USB interface
| Type: | CP2102 – Silicon Labs |
| Drivers for Windows, Macintosh and Linux: | https://www.silabs.com/products/mcu/Pages/ USBtoUARTBridgeVCPDrivers.aspx |




