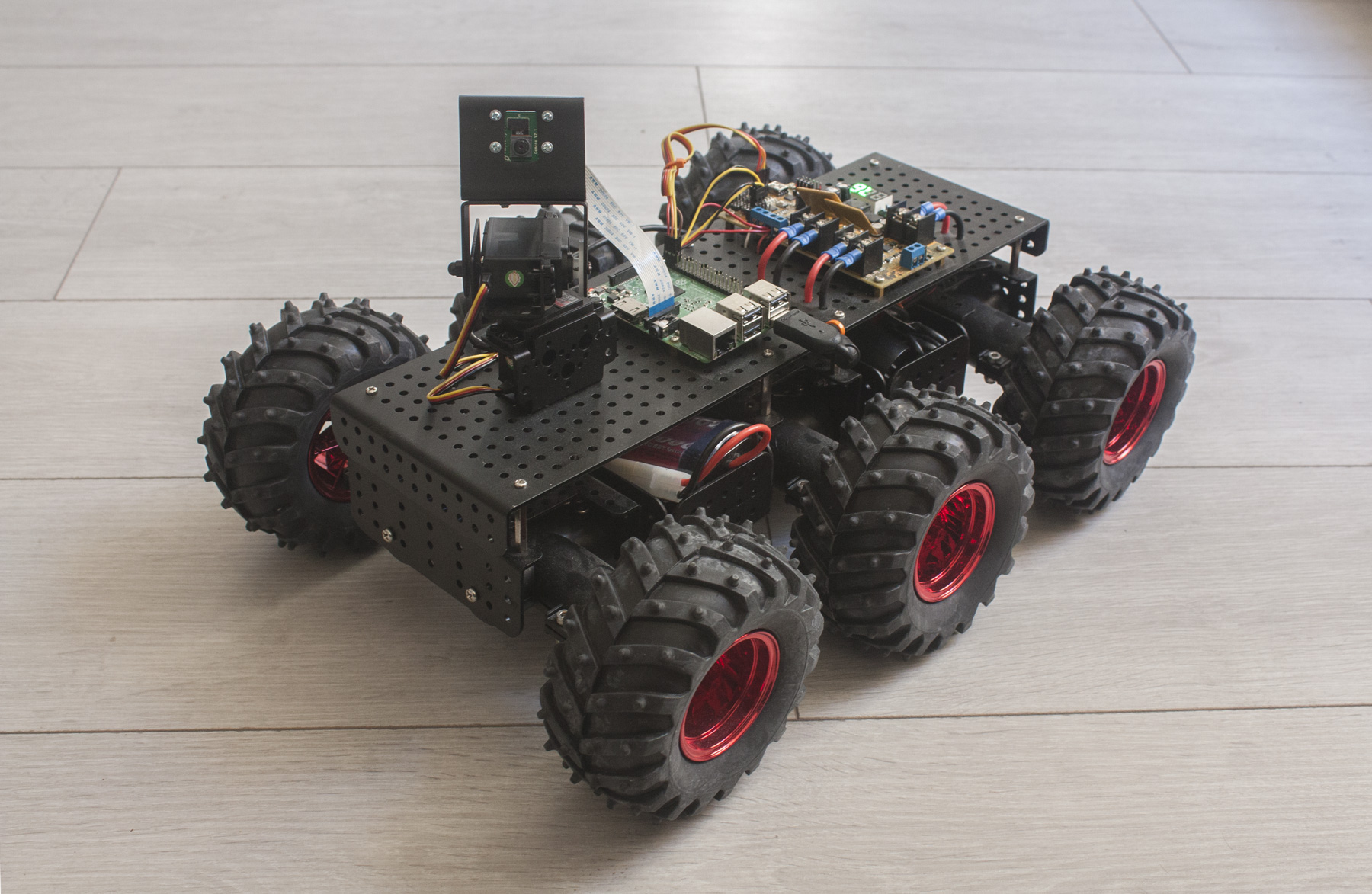
Ce blog est le journal de réalisation d’un robot mobile contrôlé par Raspberry Pi. Il utilise le châssis Wild Thumper 6WD et la carte de contrôle de moteur T’Rex..
J’y regroupe toute les informations trouvée sur Internet pour réaliser ce projet, d’une part pour m’en rappeler, mais aussi en espérant que ça puisse servir à quelqu’un..
Sommaire

Préparation du Raspberry Pi 3

Châssis Wild thumper

Carte de contrôle T’REX

Mise à jour du code du contrôleur T’REX

Communication entre Arduino et T’REX par I²C

Connexion entre Raspberry Pi et T’REX par I²C
Lire les informations du contrôleur T’REX

Envoyer des commandes au contrôleur T’REX

Utiliser une manette sans fil de Xbox 360 avec Python 3

Streamer la caméra Raspberry sur Windows

Piloter un servomoteur avec le contrôleur T’REX

Monter un pan/tilt sur la caméra
Articles récents
-

Monter un pan/tilt sur la caméra
7 octobre 2018
-
Piloter un servomoteur avec le contrôleur T’REX
23 septembre 2018
-
Streamer la caméra Raspberry sur Windows
2 septembre 2018
-
Utiliser une manette sans fil de Xbox 360 avec Python 3
1 juillet 2018
-
Envoyer des commandes au contrôleur T’REX
10 juin 2018