Monter un pan/tilt sur la caméra
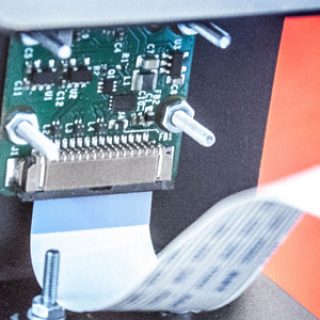
Pour installer la caméra sur le châssis et lui permettre de tourner sur 2 dimensions, on l’installe sur un support pan/tilt. Il ne s’agit que d’un montage de 2 servomoteurs montés l’un sur l’autre....
Robot mobile contrôlé par Raspberry Pi
Caméra / Raspberry Pi / Trex
par Christian · Published 7 octobre 2018 · Last modified 4 octobre 2022
Pour installer la caméra sur le châssis et lui permettre de tourner sur 2 dimensions, on l’installe sur un support pan/tilt. Il ne s’agit que d’un montage de 2 servomoteurs montés l’un sur l’autre....

Un des caractéristiques du contrôleur T’REX est qu’il peut contrôler jusqu’à 6 servomoteurs (4 si on utilise 2 encodeurs). Pour cela, on envoie la commande de position de la même manière que le contrôle...
Caméra / Raspberry Pi / Raspbian
par Christian · Published 2 septembre 2018 · Last modified 7 mars 2019
La caméra Raspberry J’utilise une caméra Raspberry Pi officielle dans sa version 2.1. Lentille : focus fixe Résolution : 8 mégapixels Résolution photo : 3280 x 2464 Résolution vidéo : 1080p30, 720p60 et 640x480p90...

Raspberry Pi / Raspbian / Trex
par Christian · Published 1 juillet 2018 · Last modified 6 octobre 2018
Installation du pilote J’utilise une manette sans-fil de Xbox 360 prévue pour PC. Pour installer les pilotes : sudo apt-get install xboxdrv On vérifie que la manette est prête à être utilisée : sudo xboxdrv...

Nous avons déjà vu comment récupérer des informations depuis le contrôleur T’REX. Ici nous allons voir comment envoyer des commandes pour changer la vitesse des moteurs et modifier la position des servomoteurs. Protocole de...
Raspberry Pi / Raspbian / Trex
par Christian · Published 20 mai 2018 · Last modified 19 septembre 2018
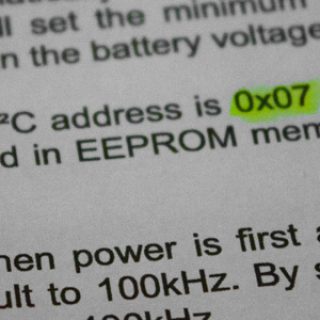
Protocole de communication avec le T’REX Le bus I²C nous permet d’échanger une série d’octet entre 2 cartes, mais ne propose pas de protocole de communication à proprement parler. Le code d’exemple du T’REX...

Raspberry Pi / Raspbian / Trex
par Christian · Published 29 avril 2018 · Last modified 21 septembre 2018
Nous avons déjà vu comment communiquer entre le T’REX et l’Arduino par I²C. Dans ce projet, l’Arduino n’est pas suffisant pour ajouter un camera, communiquer par WiFi etc. Le Raspberry Pi pouvant également communiquer...

Le contrôleur T’REX dispose d’une interface I²C avec régulation automatique de tension pour les tensions de 1.8V à 5V. Cela lui permet d’être asservi par un large éventail de contrôleurs externes, dont le Raspberry Pi....
Le contrôleur T’REX est normalement vendu avec un code d’exemple qui permet d’exploiter l’ensemble de ses fonctionnalités : Contrôle par Bluetooth, I²C ou Radio Lecture des capteurs (accéléromètre et encodeurs) Pilotage des moteurs et...

Le contrôleur T’REX de Dagu est un double pont en H qui va permettre de contrôler la vitesse et le sens des moteurs. Il dispose d’un microcontrôleur ATMEGA328 avec un bootloader Arduino ce qui...
Sommaire
Plus

Monter un pan/tilt sur la caméra
7 octobre 2018

Piloter un servomoteur avec le contrôleur T’REX
23 septembre 2018

Streamer la caméra Raspberry sur Windows
2 septembre 2018

Utiliser une manette sans fil de Xbox 360 avec Python 3
1 juillet 2018

Envoyer des commandes au contrôleur T’REX
10 juin 2018